
近日,南京大学智能科学与技术学院杨健教授、李俊教授、陈硕副教授,联合南京理工大学,提出了首个面向自监督学习的单样本范例引导框架OSESSL,该工作目前已被ICLR2026接收。
该框架旨在面向自监督学习中缺乏人工标注导致的真实类别空间缺失问题,构建一种极低标注成本(每类仅需单一样本)的表示学习方法,突破现有聚类自监督方法“表征难对齐真实语义、下游任务表征有效性受限”的关键瓶颈。
研究团队提出以单样本范例(One-Shot Exemplar)为核心的自监督学习新范式,将特征学习过程组织为从“极稀疏监督”到“海量无标签数据”的高效知识迁移链路。整体框架利用动态记忆库(Memory Bank)与双分支网络,构建了“语义锚定-特征对齐”的闭环:模型首先利用极少量的标注样本作为“锚点”探索无标签数据空间,随后将挖掘出的语义信息作为目标,引导海量无标签视图的聚类方向,最后通过边界平滑策略填补特征空间中的不确定区域,实现低成本下的表征能力跃升。
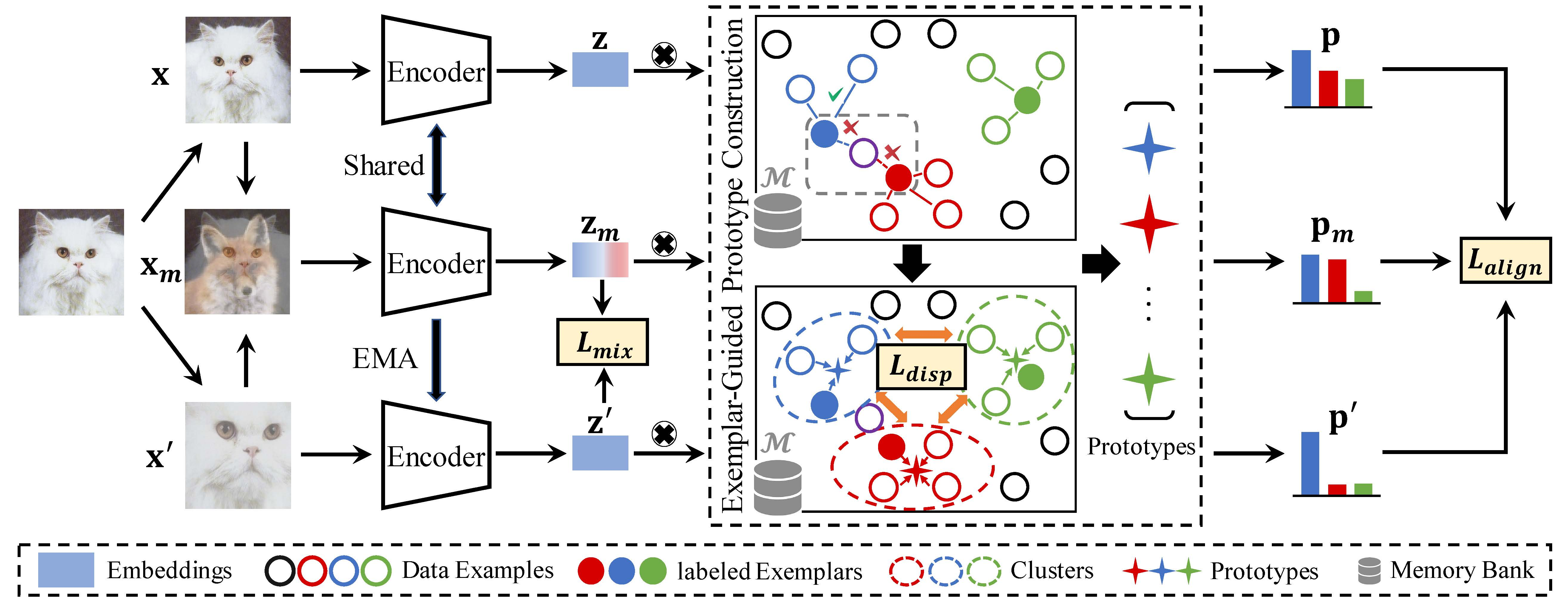
图一:OSESSL框架示意图
在具体机制设计上,OSESSL作为连接监督与自监督的“桥梁”,包含三项核心创新:其一,范例引导的原型构建(Exemplar-Guided Prototype Construction)通过结合单一范例与判别性无标签邻居,确保类中心的生成既锚定真实语义,又具备数据分布代表性;其二,范例引导的原型学习(Exemplar-Guided Prototype Learning)辅以分散正则化(Dispersion Regularization)策略,在对齐不同增强视图聚类分配的同时,强制不同类别的原型保持排斥,有效防止了多类别特征坍塌;其三,范例引导的插值一致性(Exemplar-Guided Interpolation Consistency)将引导力延伸至特征混合空间,通过对混合样本施加约束,平滑了模糊区域的决策边界,从而赋予模型更强的泛化能力。
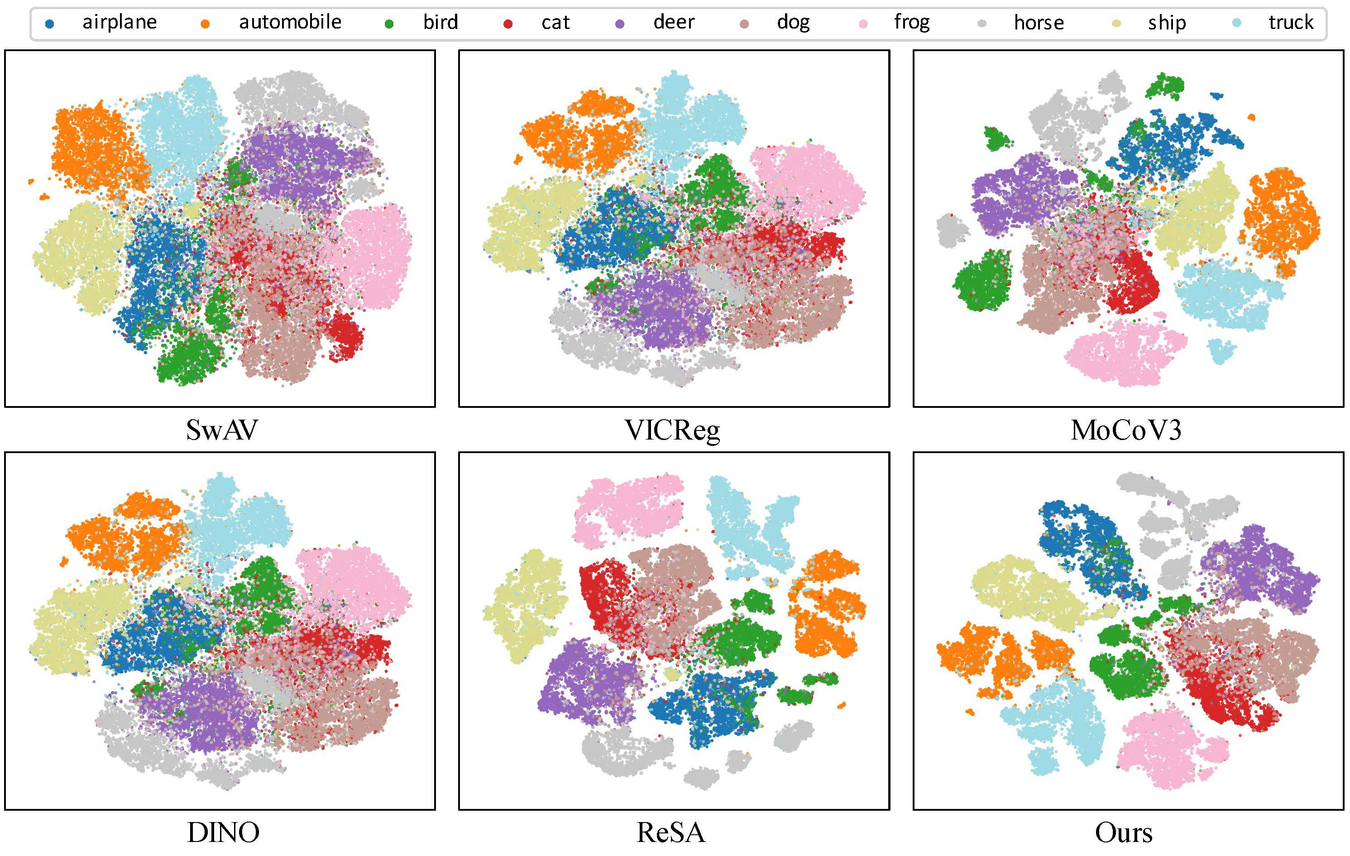
图二:CIFAR-10数据集上的特征T-SNE可视化示意图
结果表明,OSESSL在CIFAR与ImageNet等多类标准基准测试上显著提升了线性与k-NN分类准确率,并在COCO目标检测等密集预测迁移任务中保持稳定优势。相较于现有的 SOTA自监督及半监督方法,该框架在极低标注成本下,其表示质量与跨场景泛化更为稳健,为高效的视觉基础模型预训练提供支撑。