近日,由我院准聘副教授龙霄潇与电子学院曹汛教授、沈秋副教授合作研发的人形机器人运动控制算法,凭借一段《“机”乐净土》舞蹈视频,在视频平台Bilibili引发广泛关注,迅速登上全站热门榜单,现已300万播放量,成为科技与流行文化跨界融合的“破圈”热点!
该舞蹈以复杂的节拍和腿部动作为特点,对机器人的关节灵活性、运动控制精度及整体平衡系统提出了极高要求。该团队的成功演示,不仅展现了我院在具身领域,特别是在动态平衡与精密运动控制方面的领先技术实力,更以生动有趣的形式,向全社会展示了具身智能的无限可能。
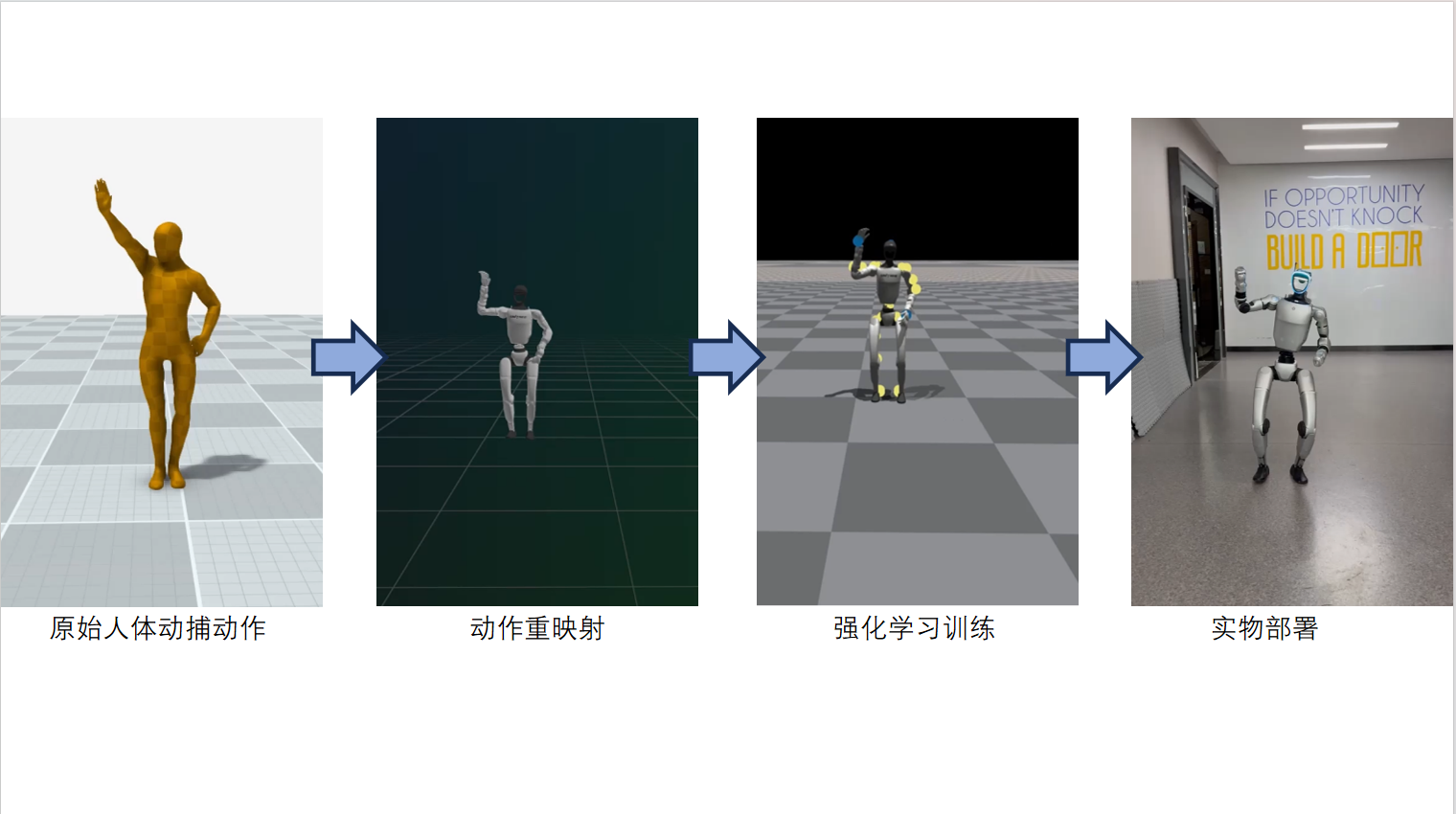
在机器人技术日新月异的发展中,人形机器人作为最具挑战性的一类,始终吸引着科研人员的关注。龙霄潇、曹汛、沈秋正在研究的一种人形机器人全身运动控制算法能够为人形机器人赋能,带来更自然、更高效的动作表现。这个方案结合了光学动捕技术、运动学重映射算法和强化学习方法。
该方法通过光学动捕技术捕捉人类的动作。光学动捕可以高精度地追踪人体关节的动态变化,精确捕捉每一个动作细节。这种方式不仅可以避免传统惯性动作捕捉的误差,还能实时获得高维度的数据,为后续的动作重映射提供充足的信息。
接下来,基于捕捉到的动作数据,该方法采用运动学重映射算法,将人类动作转化为机器人可以执行的关节运动。这一过程涉及对于末端连杆的逆运动学计算和形态匹配,确保机器人的关节运动能够准确反映出人类动作的每一个细微差别。例如,通过精准的关节映射,机器人不仅能够完成简单的动作模仿,还能在空间中进行流畅的动态动作表现。
然而,仅仅依赖于这些静态的映射并不足以满足高度智能化机器人的需求。为了让机器人能够适应各种复杂环境,自动学习和优化动作,该方法引入了强化学习方法。在强化学习框架下,机器人不仅能够根据预设的奖励机制自主调整自己的动作,还可以通过反复的训练与试错,逐步提高动作的精准度和流畅度。通过这种不断自我学习的方式,机器人能够形成一个全身协调的运动控制系统,在复杂的环境中完成灵活、自然的运动。
这一结合光学动捕、运动学重映射与强化学习的技术方案,类似于业内领先的GMR(Generative Motion Reproduction)和BeyondMimic等研究成果,推动了机器人从“模仿”向“自我学习”转变,为机器人在实际应用中如人机交互、娱乐、医疗等领域的落地提供了技术保障。